A robot brain is not only an AI computer. In practical robot design, it is the system that connects perception, decision-making, real-time motion control, sensor data, communication buses, and safety behavior into one robot-side intelligence loop.
What Is a Robot Brain?
A robot brain is the computing and control foundation that allows a robot to understand its environment, make decisions, and execute physical actions. It receives data from cameras, lidar, IMUs, force sensors, encoders, and communication interfaces, then turns that data into perception, planning, control commands, and feedback correction.
For embodied AI systems, the robot brain must do more than run an AI model. It must help the machine act in the physical world. That means combining AI inference with real-time control, deterministic communication, sensor synchronization, thermal design, and deployment reliability.
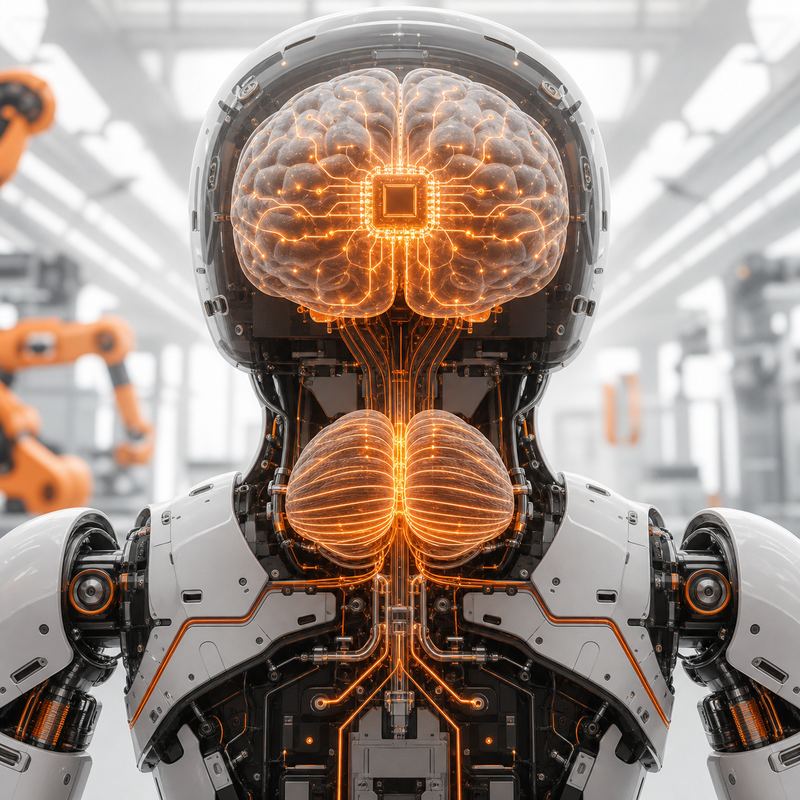
The Brain-Cerebellum Architecture
A useful way to understand robot intelligence is the brain-cerebellum architecture. The “brain” layer focuses on perception and decision-making. The “cerebellum” layer focuses on fast, stable, and precise action.
Handles perception, semantic understanding, navigation, task planning, behavior decisions, local AI inference, and human-machine interaction.
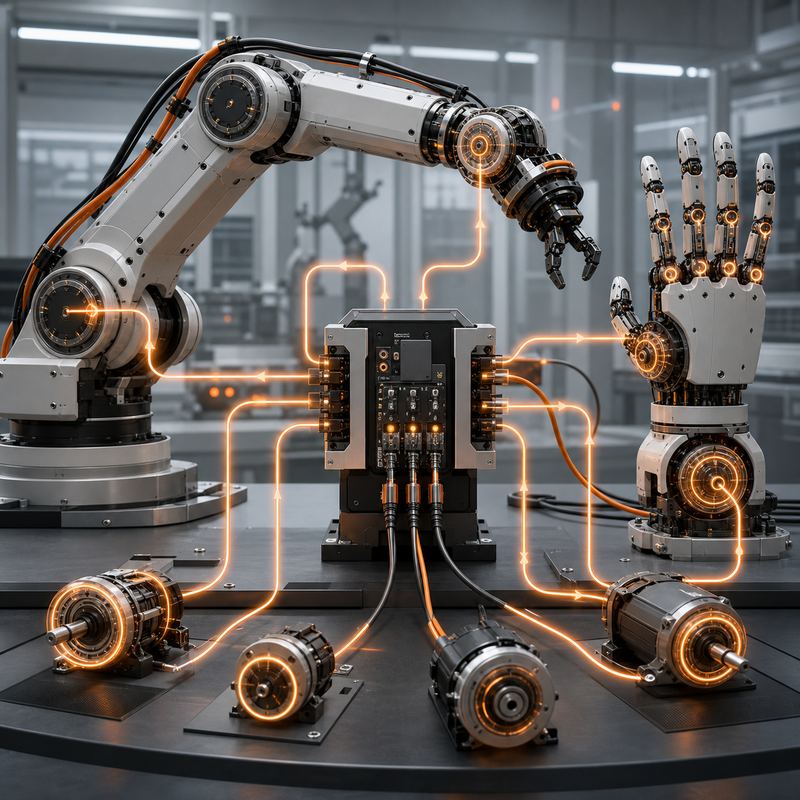
Handles motion execution, actuator communication, real-time control loops, EtherCAT or CAN bus control, timing accuracy, and feedback correction.
Why Robots Need Both Decision Intelligence and Real-Time Control
AI models can identify objects, understand language, estimate poses, and plan actions. But physical robots also need to move motors at the right time, apply the right force, maintain balance, and respond to unexpected contact. If the decision layer is powerful but the execution layer is slow or unstable, the robot may understand the task but fail to perform it reliably.
This is why robot-side compute should not be evaluated only by TOPS. Important engineering factors include interrupt response, control-loop timing, sensor timestamp alignment, industrial bus support, thermal stability, power budget, and mechanical integration.
| Robot Function | Compute Requirement | Control Requirement |
|---|---|---|
| Object recognition | Vision AI inference, camera input, local model execution | Stable sensor timing and low-latency data pipeline |
| Navigation | Sensor fusion, mapping, localization, path planning | Real-time correction based on wheel, leg, or actuator feedback |
| Manipulation | Pose estimation, grasp planning, task reasoning | High-frequency motor control, force feedback, synchronized joints |
| Humanoid motion | Perception, balance planning, behavior decisions | Deterministic joint control, bus communication, safety response |
What Makes a Robot Brain Deployment-Ready?
A deployment-ready robot brain should be evaluated as a system, not as a generic compute board. The most important questions are:
- Can it process the robot’s actual camera, lidar, IMU, encoder, and force-sensor data?
- Can it run perception and planning workloads locally without depending on cloud latency?
- Can it communicate with actuators through real-time industrial buses?
- Can it maintain stable timing under heat, vibration, and continuous operation?
- Can the architecture scale from prototype to product deployment?
Short Answer
A robot brain is the robot-side compute and control system that turns sensor data into intelligent action. The best architecture separates decision-making from real-time execution while keeping both layers tightly integrated on the robot.
Where MScape Fits
MScape builds robotics edge AI computers and real-time control platforms around this brain-cerebellum idea. The MScape product family includes N Series robot brains for edge AI compute and T Series platforms for AI compute plus real-time control.
Relevant MScape Platforms
- MScape N1000: high-performance robotics edge AI computer for advanced embodied AI workloads.
- MScape N210: compact robot brain for humanoid and embodied AI systems.
- MScape T200: AI compute and control platform for robots that need tighter brain-cerebellum integration.
- MScape T40/T41: real-time robot motion controller for deterministic execution.
Use Cases
Brain-cerebellum architecture is especially relevant for bipedal and humanoid robots, quadruped robots, dexterous robot hands, autonomous forklifts, and collaborative robots.
FAQ
Is a robot brain the same as an edge AI computer?
Not always. An edge AI computer provides local AI compute. A robot brain should also address sensor input, communication, real-time control, deployment constraints, and the connection between decision-making and action.
Why does real-time control matter for embodied AI?
Embodied AI must act in the physical world. If motion commands arrive late or actuator feedback is unstable, the robot may fail even when its AI model makes the correct decision.
What should robot teams evaluate before choosing a robot brain?
Evaluate compute workload, sensor count, camera interfaces, actuator buses, real-time operating system needs, thermal limits, power budget, mechanical space, and the target deployment environment.